【技术向】 什么是端到端自动驾驶 Part1
经典的自动驾驶系统有着相对统一的系统架构:
- 探测(detection)
- 跟踪(tracking)
- 静态环境建图(mapping)
- 高精地图定位(目前去地图方案会有变体)
- 目标物轨迹预测
- 本车轨迹规划
- 运动控制
几乎所有的自动驾驶系统都离不开这些子系统,在常规的技术开发中,这些模块分别由不同的团队分担,各自负责自己模块的结果输出。
这样的好处是,每一个子系统都能够有足够好的可解释性,在开发时能够独立优化。与此同时,为了保证整体自动驾驶的性能,每一个模块都需要保证给出稳定的表现。
所以事实上在一个 Bug 出现时,需要巨大的分析 团队对 Bug 进行分析,然后将具体的 Bug 来源分配给责任团队。
据说在 Waymo,甚至有超过 200 人的团队,对 Bug 进行分析和责任分配。
那找 Bug 来源和 Bug 优化的任务就不能自动化吗?当然可以, 如果我们能将各个模块用可微分的方式连接起来。类似于传统深度学习,出现误差时,深度自动回传进行权重更新。某种程度上,这就是端到端自动驾驶的概念。
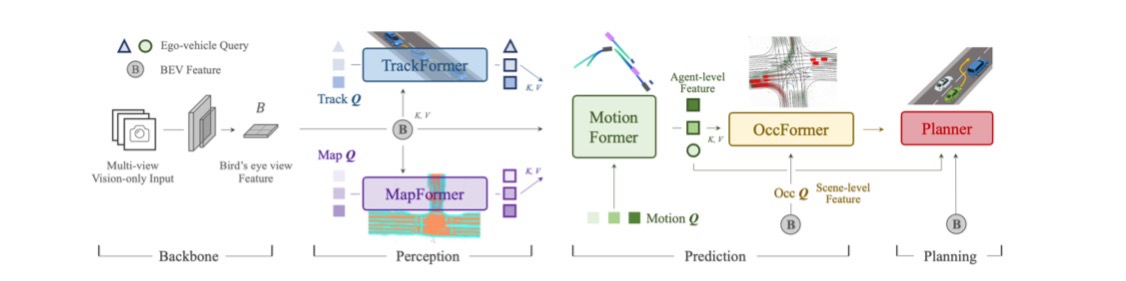
例如下图的Uni-AD,就是将除了控制之外的模块连接在了一起,可以端到端进行优化,但是每个模块又相对独立,可以单独优化。
这种创新得到了2023 CVPR (计算机视觉顶级研讨会议)的肯定,获得了今年的最佳论文。
这篇论文是上海人工智能实验室和地平线做的。
特斯拉FSD V12可能也是类似的方案。